



Задача автоматизации
Разработка системы управления для глубинного насоса, осуществляющего подачу воды в накопительную емкость объемом 5 000 л, при которой следовало учесть следующие особенности эксплуатации:
- во-первых, такое оборудование, как глубинный насос, достаточно дорогостояще, к тому же насос и кабель питания постоянно находятся в воде, поэтому помимо постоянного контроля за током в обмотках насоса необходимо отслеживать утечки в случае повреждения изоляции обмоток или кабеля;
- во-вторых, для увеличения ресурса насоса необходим плавный запуск в течение определенного времени;
- в-третьих, необходимо автоматическое поддержание уровня воды в накопительной емкости, к тому же необходимо предусмотреть защиту от ее переполнения.
Реализация проекта и выбор средств автоматизации
Управление насосом заключатся в поддержании заданного уровня воды в накопительной емкости объемом 5 000 л. На емкости установлены емкостные датчики ВБЕ в количестве 3 шт. Верхний датчик BQ1 является аварийным: если уровень воды поднимется до него, то происходит моментальная остановка насоса, т.е. осуществляется защита от переполнения. BQ2 – это датчик верхнего уровня. При его срабатывании насос должен отключаться. BQ3 – датчик нижнего уровня . Если уровень жидкости опустился ниже этого датчика, то происходит запуск насоса и остановка при срабатывании BQ2.
Размещение емкостных датчиков схеме системы управления глубинным насосом с помощью программируемого реле ОВЕН ПР110
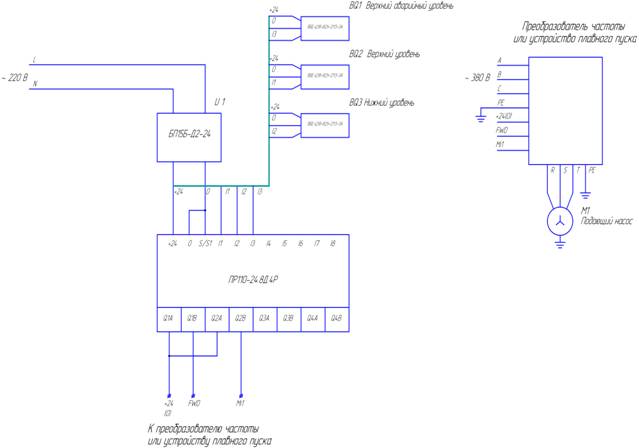
Учитывая необходимость плавного запуска насоса, контроля утечек тока в случае повреждения изоляции обмоток или питающего кабеля, применен преобразователь частоты. Однако может быть использован любой ПЧ в зависимости от мощности двигателя и бюджета.
Исходя из этого, была разработана принципиальная схема системы управления глубинным насосом с помощью программируемого реле ОВЕН ПР110.
Входы преобразователя частоты показаны условно. Вход FWD настроен на запуск и остановку по сигналу +24 В. Запуск происходит при наличии +24 В, при отсутствии – остановка. Питание входных цепей взято от внутреннего источника питания преобразователя частоты (замечу, что у разных производителей оно может быть равным как +12…24 В, так и 0 В, к тому же в большинстве случает внутренний источник является маломощным). Вход Mi1 является программируемым и настроен как внешний останов вне зависимости от уровня напряжения на входе FWD. Источник питания любой, в данном случае это ОВЕН БП15Б-Д2-24 (24 В, 15 Вт). Помимо преобразователя частоты может быть применено устройство плавного запуска.
Используемое оборудование:
- BQ1–BQ3 – ВБЕ-Ц18-82У-2113-3А.
- U1 – блок питания ОВЕН БП15Б-Д2-24.
- Программируемое реле ОВЕН ПР110-24.8Д.4Р.
- Преобразователь частоты VFD-E, устройство плавного пуска.
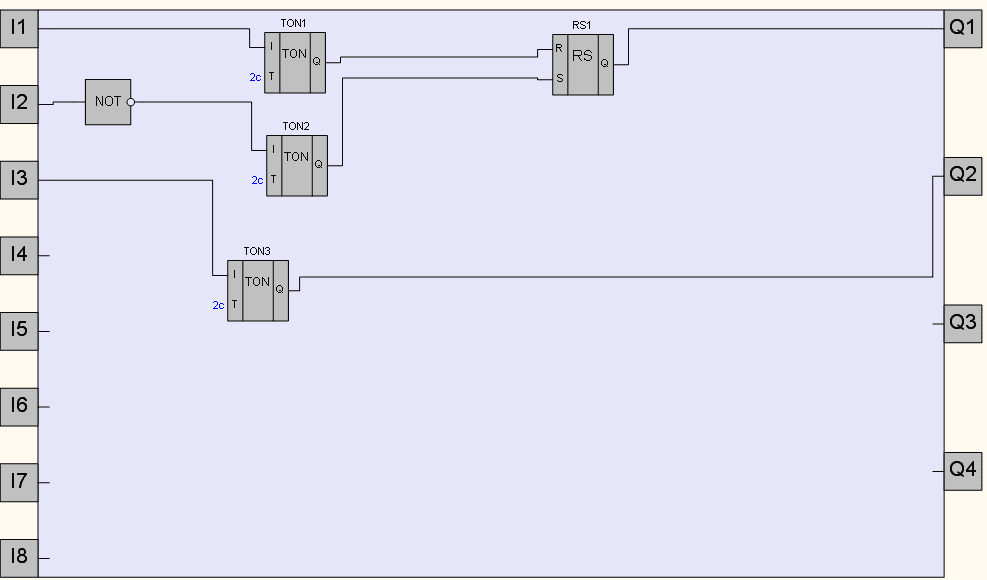
Работа системы управления глубинным насосом
Для исключения частых срабатываний от датчиков при колебаниях уровня жидкости применены таймеры с задержкой включения TON1-TON3. Управление выходом Q1 осуществляется с помощью RS-триггера RS1. Если уровень жидкости ниже датчика верхнего уровня и нижнего по таймеру TON2 и поступает сигнал на вход S триггера, соответственно включается выход Q1. Как только уровень достигнет датчика верхнего уровня, по таймеру TON1 на вход триггера R поступит сигнал, соответственно выход Q1 будет выключен. Датчик аварийного уровня через таймер TON3 выдает сигнал на выход Q2.
В программу можно внести несколько дополнений для световой и звуковой сигнализации, счетчика наработки и т.п.
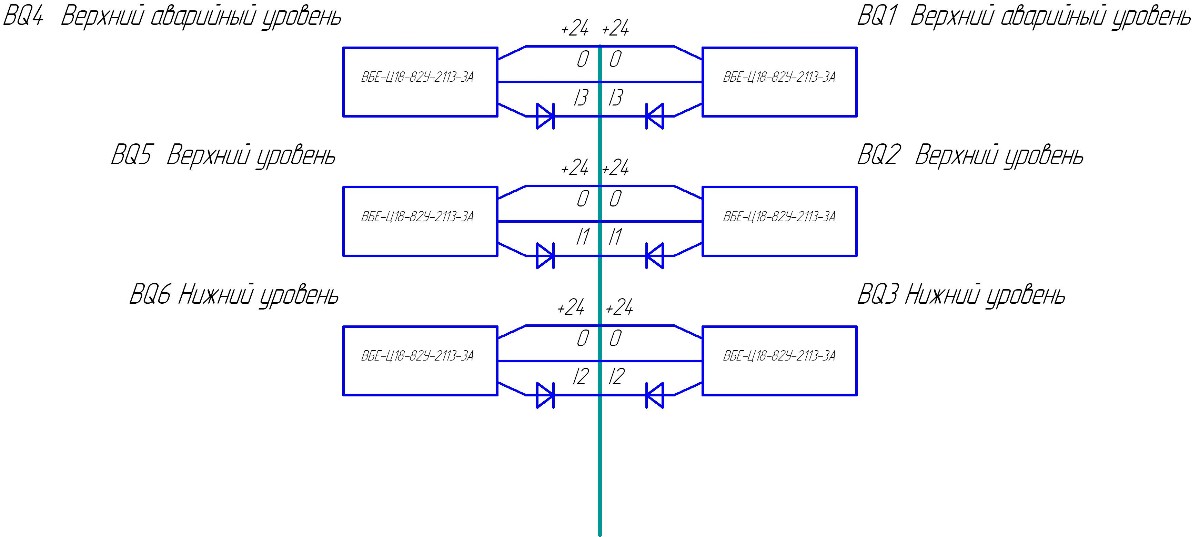
Для безотказной работы датчики уровня можно зарезервировать через развязывающие диоды.



